Quellcode durchsuchen
add control GPIO

4 geänderte Dateien mit 21 neuen und 5 gelöschten Zeilen
+ 3
- 0
README.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 18
- 5
distance_estimation/spray_pesticide.py
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
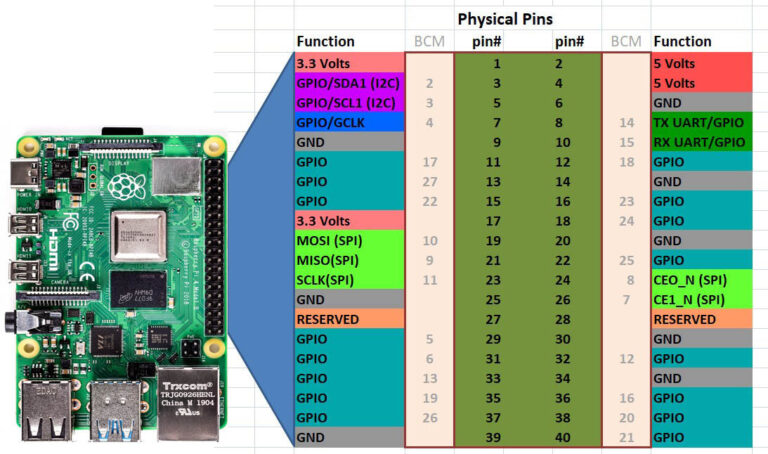
pinout-corrected.jpg
{kind=link}