haminhtien99
8e13d45ba2
add control GPIO
haminhtien99
8e13d45ba2
add control GPIO
|
пре 9 месеци | |
|---|---|---|
| camera_calibration | пре 10 месеци | |
| distance_estimation | пре 9 месеци | |
| generate_markers | пре 10 месеци | |
| .gitignore | пре 10 месеци | |
| README.md | пре 9 месеци | |
| chessboard.png | пре 10 месеци | |
| default_config.py | пре 10 месеци | |
| map_markers.jpg | пре 10 месеци | |
| pinout-corrected.jpg | пре 9 месеци | |
| requirements.txt | пре 9 месеци |
{kind=link}
{kind=link}
{kind=link}
README.md
LANDING_SPACE
Thuật toán hạ cánh và điều hướng drone dựa trên ArUco marker
Tải xuống git này và cài đặt các tài nguyên cần thiết
git clone https://git.vnai.xyz/haminhtien99/landing_space
cd landing_space
pip install -r requirements.txt
Cài đặt các giá trị ban đầu cho marker
Di chuyển tới file default_config.py, thay đổi các giá trị sau. Lưu ý kích thước MARKER_SIZE và SQUARE_SIZE đặt cùng đơn vị (tùy ý centimet, milimet), khi đó kết quả đầu ra về khoảng cách sẽ nhận được giá trị tương ứng
MARKER_SIZE=5 # kích thước các mã QR-code
set_resolution='original' # điều chỉnh độ phân giải cho camera, đặt original nếu ko thay đổi
SQUARE_SIZE = 2.1 # kích thước ô của bàn cờ
# Thiết lập các giá trị cho việc phun thuốc
ALLOWED_ANGLE_DEG = 20 # Góc lệch cho phép giữa aruco và camera
ALLOWED_XYZ_RANGE = { # Phạm vị lệch cho phép x, y, z của aruco tag trong hệ tọa độ gắn với camera
"x": (-10, 10),
"y": (-10, 10),
"z": (20, 50),
}
SPRAY_DURATION = 5 # Thời gian phun thuốc
Hiệu chuẩn camera:
Để thực hiện hiệu chuẩn, cần phải chụp ảnh bàn cờ chessboard.jpg được in trên giấy với nhiều góc độ, vị trí khác nhau
python camera_calibration/capture_images.py
- Nhấn phím "s" để chụp ảnh, nhấn "q" để kết thúc.
- Ảnh sẽ được lưu vào thư mục con của thư mục
camera_calibration/images, tương ứng với giá trịset_resolutionđược đặt ban đầu.
python camera_calibration/capture_images_without_showing.py, tương tự bên trên
- Ảnh sẽ được tự động lưu vào thư mục
camera_calibration/imagessau mỗi 5 giây. - Nhấn tổ hợp phím
Ctrl+Cđể thoát chương trình
python camera_calibration/calibration.py
- Thông số hiệu chuẩn của camera sẽ được lưu vào thư mục
camera_calibration/calib_data.
Dữ liệu hiệu chuẩn
Dữ liệu hiệu chuẩn camera lưu tại tệp .npz. Dữ liệu này bao gồm:
- camMatrix: Ma trận camera, chứa các tham số nội tại của camera.
- distCoef: Các hệ số biến dạng của camera.
- rVector: Vector xoay của từng ảnh dùng để hiệu chuẩn.
- tVector: Vector tịnh tiến của từng ảnh hiệu chuẩn.
Tạo mã Aruco:
- Tạo tùy ý 20 mã marker. Chạy
python generate_markers/generate.py. - Có thể thay đổi loại marker tùy ý, trong bài toán này sử dụng loại 7x7 (
aruco.DICT_7X7_50)
Ước lượng vị trí marker so với camera:
- Chạy
distance_estimation/distance_single.py - Cài đặt
visualization = Trueđể in kết quả đầu ra kèm kết quả hình ảnh, nhấnqđẻ thoát; - Hoặc chạy
visualization = Falseđể in kết quả đầu ra, nhấnCtrl + C.
Ước lượng vị trí camera:
Chuẩn bị
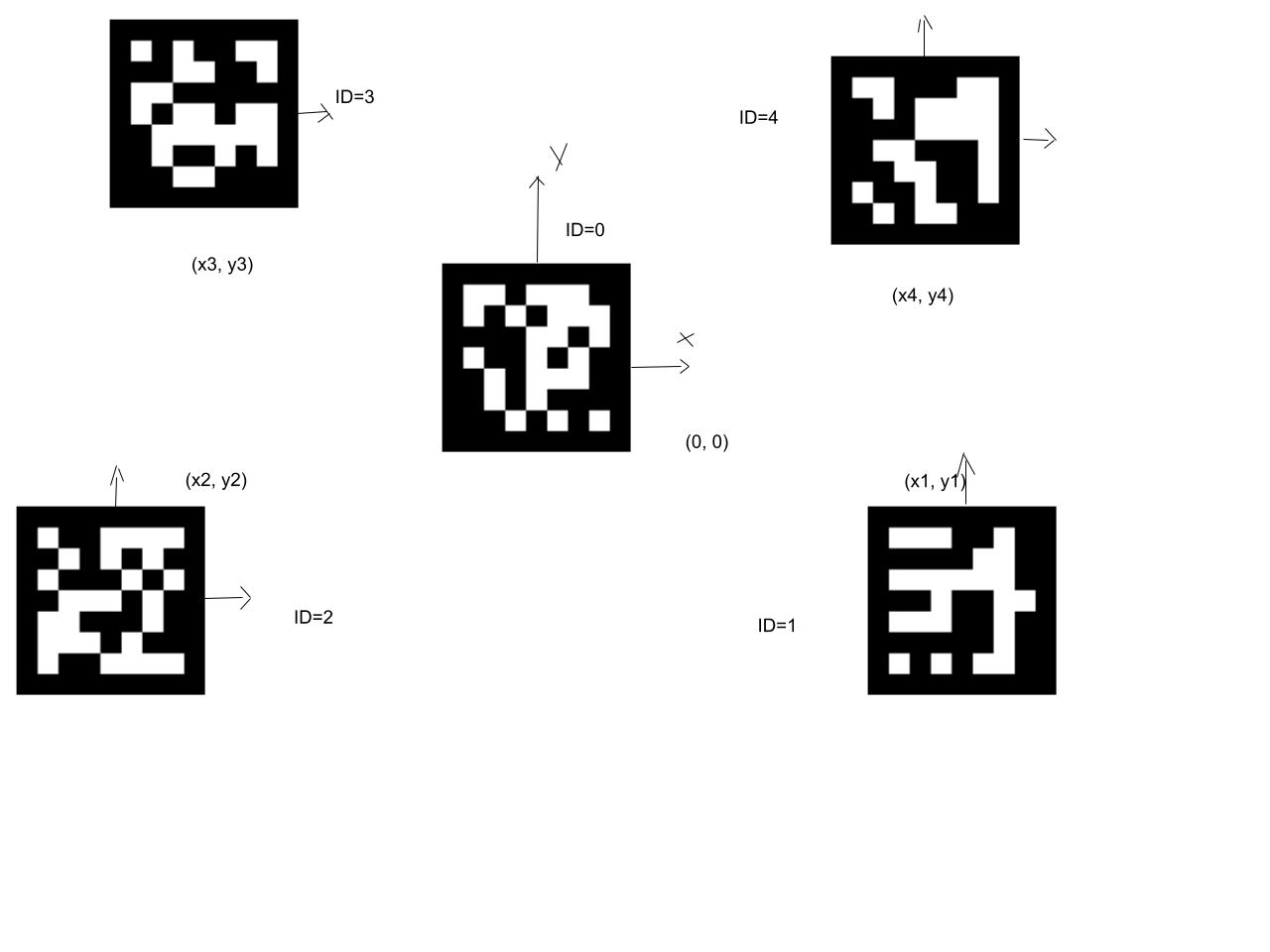
- Chuẩn bị marker như trong hình mô tả
map_markers.jpg. - Xác định chuẩn xác vị trí tương đối của các ID1, ID2, ID3, ID4 so với ID0 ở trung tâm (lấy hệ tọa độ mặt phẳng là trục x, y của marker ID0). Nên đặt các marker vùng rìa không đối xứng nhau nhằm tối ưu tính toán tọa độ trong trường hợp bị che khuất. Gắn các marker sao cho các trục x, y, z cùng hướng với nhau.
Tính toán
python distance_estimation/camera_position.py
- Ược lượng vị trí camera trong bản đồ tạo bởi các marker được xác định trước
- Phương pháp này tính toán vị trí tương đối camera so với marker từ giá trị của vecto chuyển vị tVec, vì vậy yêu cầu camera luôn phải song song với mặt phẳng marker.
- Lấy
marker_0làm gốc, tọa độ các marker khác được cài đặt trong filedefault_config.py - In ra màn hình kết quả các giá trị
x, y, z, roll, pitch, yaw- lần lượt tọa độ camera trong hệ tọa độ marker_0 làm gốc,roll, pitch, yaw- góc quay camera so với mặt phẳng chứa marker - Đặt
visualization= Trueđể hiển thị video với tọa độ camera(x, y, z)cùng với góc quay(roll, pitch, yaw)so vớimarker_0. Nhấn phímqđể kết thúc, thoát video - Nếu
visualization=False, nhấnCtrl + Cđể thoát.
python distance_estimation/camera_position_and_log.py
Tùy chọn ước lượng vị trí camera cùng với lưu lịch sử
Tùy chọn phun thuốc trừ sâu
python distance_estimation/spray_pesticide.py
- Thiết lập thuộc tính phù hợp với phạm vi lệch về góc, tọa độ xyz của marker so với camera, đảm bảo marker ở trung tâm, thời gian phun
- In ra trạng thái mỗi marker
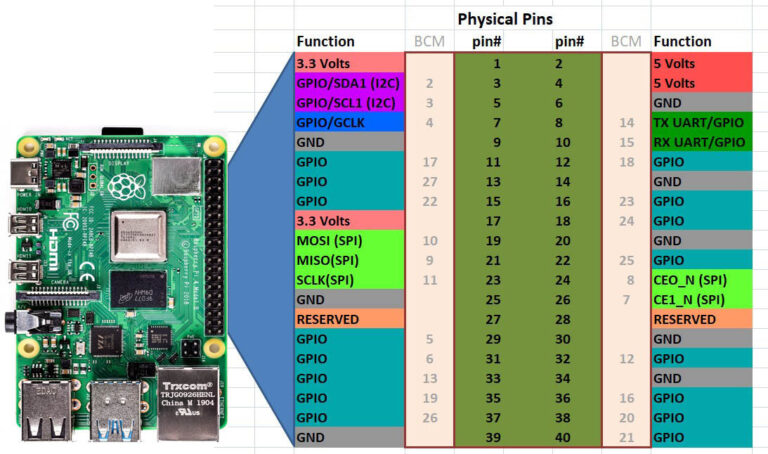
Khi phun, GPIO 17 được bật (kết nối với LED), phun xong sẽ tắt.
Thông tin các I/O trên Raspberry Pi